



Vetykäyttöisten polttokennoajoneuvojen polttokennojärjestelmän ohjausalgoritmien valinnassa on ratkaisevan tärkeää ottaa huomioon ohjausvaatimukset ja toteutuksen taso. Hyvä ohjausalgoritmi mahdollistaa polttokennojärjestelmän tarkan ohjauksen, eliminoi tasapainotilan virheet ja saavuttaa erittäin tarkan ohjauksen. Tutkijat ovat tutkineet erilaisia polttokennojärjestelmien ohjausalgoritmeja, mukaan lukien verrannollinen-integraaliohjaus, tilatakaisinkytkentäohjaus, segmentoitu ennustava negatiivinen takaisinkytkentäohjaus, epälineaarinen eteenpäinkytkentä ja lineaarinen kvadraattinen säädintakaisinkytkentäohjaus sekä yleistetty ennustava ohjaus. Nämä ohjausalgoritmit eivät kuitenkaan sovellu hyvin vetykäyttöisiin polttokennoajoneuvoihin polttokennojärjestelmän parametrien epälineaarisuuden ja epävarmuuden vuoksi. Näillä algoritmeilla on rajoituksia, erityisesti dynaamisten kuormituksen muutosten ja järjestelmäparametrien vaihteluiden yhteydessä, mikä johtaa hyväksymättömään suljetun silmukan suorituskykyyn.

Tällä hetkellä sopivin säätöalgoritmi polttokennojärjestelmille on sumea säätö. Sumean säädön pohjalta tutkijat ovat ehdottaneet järkevämpää säätöalgoritmia, jota kutsutaan muuttuvan alueen sumeaksi inkrementaaliseksi säädöksi. Tämä algoritmi säilyttää sumean säädön edut, kuten riippumattomuuden ohjattavan kohteen tarkoista malleista, rakenteen yksinkertaisuuden, hyvän sopeutumiskyvyn ja kestävyys. Lisäksi se ratkaisee sumeassa säädössä mahdollisesti esiintyvät heikon tasapainotilan tarkkuuden ja staattisten virheiden ongelmat. Käyttämällä skaalauskertoimia sumean säädön laajentamiseen tai supistamiseen algoritmi lisää epäsuorasti säätösääntöjen määrää, jolloin tasapainotilan virheet ovat nollassa ja säätö on erittäin tarkkaa. Lisäksi muuttuvan alueen sumea inkrementaalinen säätöjärjestelmä reagoi nopeasti dynaamisesti laajalla virhealueella, mikä mahdollistaa järjestelmän välttää säätökuolleita alueita pienillä poikkeama-alueilla ja parantaa entisestään järjestelmän dynaamista ja staattista suorituskykyä sekä kestävyysominaisuuksia.
01
Polttokennojärjestelmän parametrien epälineaarisuus ja epävarmuus
Vaikka vetykäyttöisillä polttokennoajoneuvoilla on etuja, kuten alhainen melutaso, korkea hyötysuhde, hyvä teho ja pitkä ajomatka vetykaasulla energialähteenä, polttokennossa tapahtuu samanaikaisesti monia sisäisiä kuljetusprosesseja, kuten lämmönsiirto, varauksensiirto, tuotepäästöt ja reaktiokaasujen syöttö. Tämän seurauksena tekijät, kuten lämpötila, kosteus, ilmavirtaus ja virta, jakautuvat epätasaisesti reagoivan aineen virtauskentässä. Tämä tuo polttokennojärjestelmään epälineaarisuutta ja epävarmuutta, ja jos näitä tekijöitä ei hallita kunnolla, niillä voi olla haitallisia vaikutuksia polttokennon suorituskykyyn ja kuntoon.
02
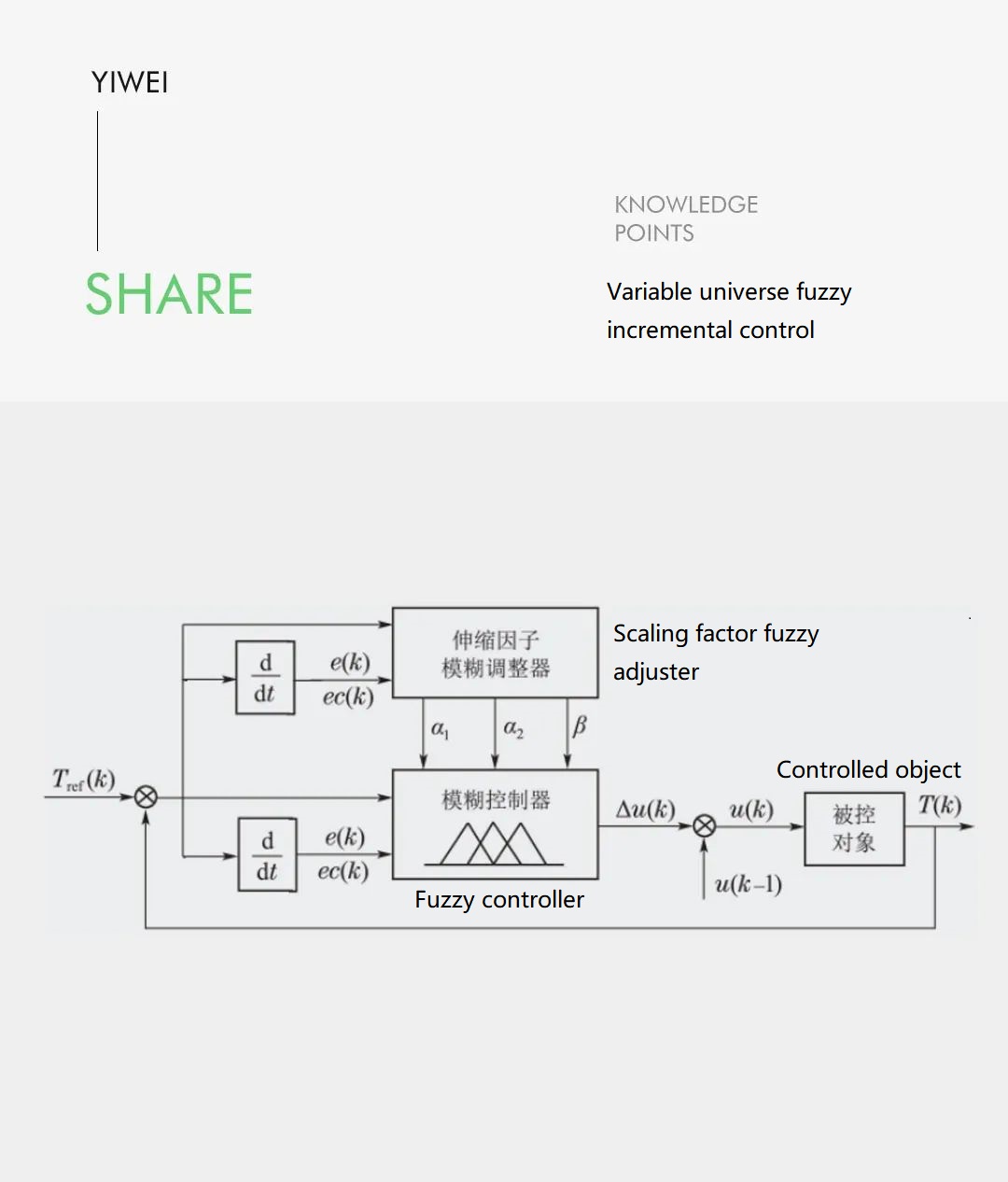
Muuttuvan alueen sumean inkrementaalisen ohjauksen edut
Muuttuvan alueen sumea inkrementaalinen säätö on sumeaan säätöön perustuva optimointi. Se ei ainoastaan säilytä sumean säädön etuja, kuten riippumattomuutta ohjattavan kohteen tarkoista malleista, rakenteen yksinkertaisuutta, hyvää sopeutumiskykyä ja vahvaa kestävyysominaisuuksia, vaan se myös ratkaisee sumean säädön mahdolliset heikon tasapainotilan tarkkuuden ja staattisten virheiden ongelmat. Käyttämällä skaalauskertoimia sumean säätöalueen laajentamiseen tai supistamiseen, säätösääntöjä voidaan epäsuorasti lisätä, mikä mahdollistaa nolla tasapainotilan virhettä ja erittäin tarkan säädön. Lisäksi muuttuvan alueen sumean inkrementaalisen säätöjärjestelmän dynaaminen vastenopeus on nopea laajalla virhealueella, minkä ansiosta järjestelmä voi välttää säätökuolleita alueita pienillä poikkeama-alueilla ja parantaa entisestään järjestelmän dynaamista ja staattista suorituskykyä sekä kestävyysominaisuuksia.
Chengdu Yiwei New Energy Automobile Co., Ltd on korkean teknologian yritys, joka keskittyy sähköautojen alustan kehittämiseen, ajoneuvojen ohjaukseen, sähkömoottoreihin, moottorinohjaimiin, akkuihin ja älykkäisiin verkkotietojärjestelmiin.
Ota yhteyttä:
yanjing@1vtruck.com+(86)13921093681
duanqianyun@1vtruck.com+(86)13060058315
liyan@1vtruck.com+(86)18200390258

Julkaisun aika: 11.10.2023



